Un diodo es un componente electrónico de dos
terminales.

DIODO
Se fabrica de modo que queden dos zonas, una donde faltan electrones (zona con huecos) llamada “ZONA POSITIVA” y otra con
exceso de electrones “ZONA NEGATIVA”

ZONAS Y SÍMBOLO DEL DIODO
El DIODO también es considerado el primer
componente “semiconductor”
Porque según la polaridad de cómo se
conecte en un circuito de corriente directa se comporta como conductor o como aislador.

DIODO COMO CONDUCTOR
Conexión de diodo directa. La lampara enciende.

DIODO COMO AISLADOR
Conexión de diodo inversa. la lampara no enciende.
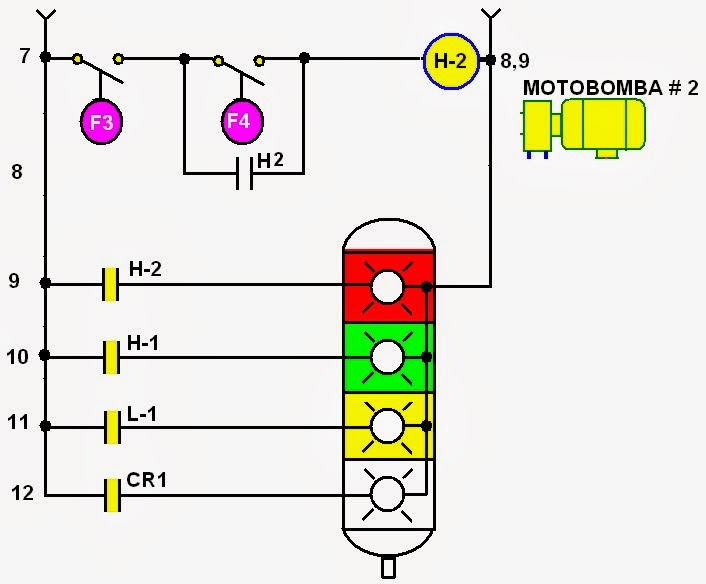
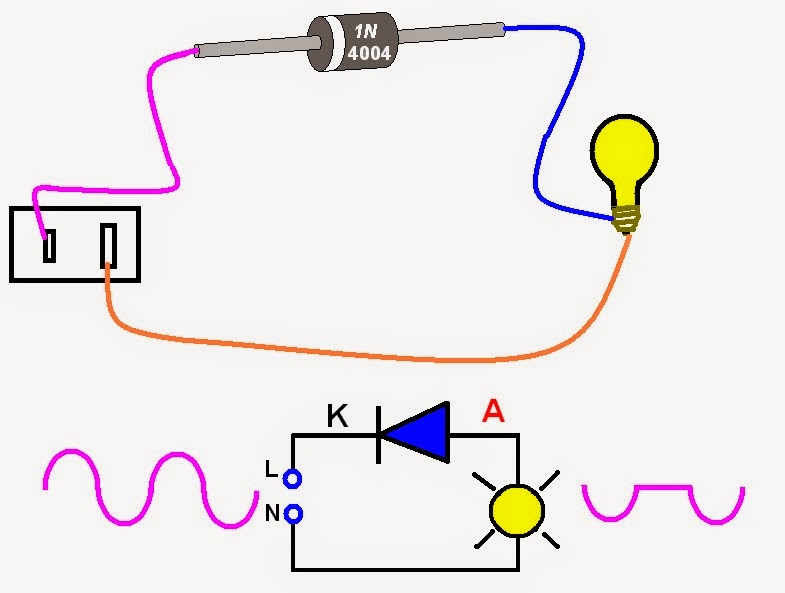
En corriente alterna un
diodo separar los ciclos.
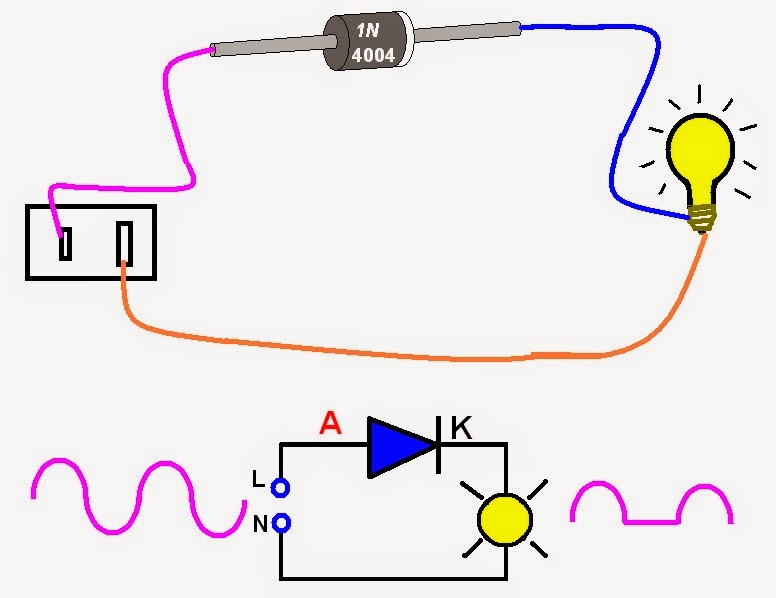
DIODO EN CONEXIÓN DIRECTA en C.A.
En esta conexión al estar conectada la
terminal positiva (ánodo) del diodo a la línea viva permitirá solo pasar la mitad de los ciclos, los de valor positivo, se dice que permite el paso de “media onda”
DIODO EN CONEXIÓN INVERSA en C.A.
En conexión inversa solo permite pasar la media onda negativa
Los manuales de remplazo de diodos
contienen las características de los diodos.
Dimensiones y datos técnicos

DATOS TÉCNICOS DE DIODOS
En el mercado existen diodos con cuerpo de cerámica que permiten el paso de corriente de cientos de amperes y se conectan a miles de volts.