La paridad y disparidad en contactos eléctricos, son cualidades de funcionalidad implementados en equipos utilizados en entornos peligrosos, para cumplir con normativas de seguridad.

Paridad y disparidad en contactos
eléctricos
Las áreas de operación
de Robots son zonas de alto peligro y están
resguardadas por mallas,
cuando se entra en ellas, los dispositivos utilizados como los interruptores
habilitadores, y los programadores portátiles, deben cumplir con normativas de
seguridad categoría 3 o superior (ISO 13849-1).
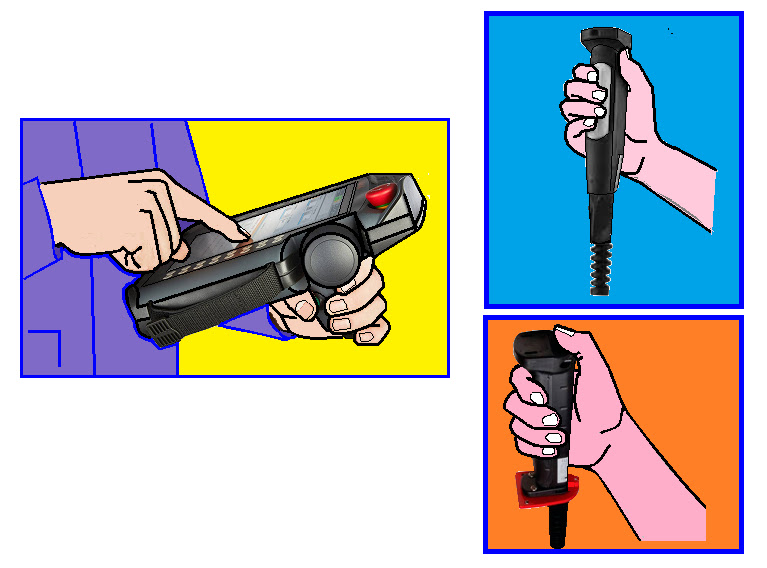
Equipo de ingreso a áreas
peligrosas con contactos eléctricos con paridad de funcionamiento
En estos dispositivos móviles
se instalan dos contactos, que obliga a hacer una tarea doble, se busca la
duplicidad con fines de seguridad.
Este par de contactos actúan de forma independiente, no deben
tener ligazones mecánicas que bloquen sus movimientos, pero deben de actuar de
manera similar.

Paridad y disparidad
Con cualidad de paridad, las condiciones que se tiene es que
los dos estén abiertos o los dos cerrados.
Sin embargo se puede presentar una condición peligrosa, un
contacto puede fallar por soldadura o corto circuito, y mantenerse como un
contacto cerrado en cualquier posición.



















